Bonjour,
Je n'ai fait que dessiner le plan de ce que je voulais, le bassin a été réalisé par un pisciniste, par contre je me suis occupé de tout ce qu'il y a autour (terrasse, muret, douche). J'ai aussi rajouté ultérieurement une PAC (on avait prévu le bybass dès la conception).
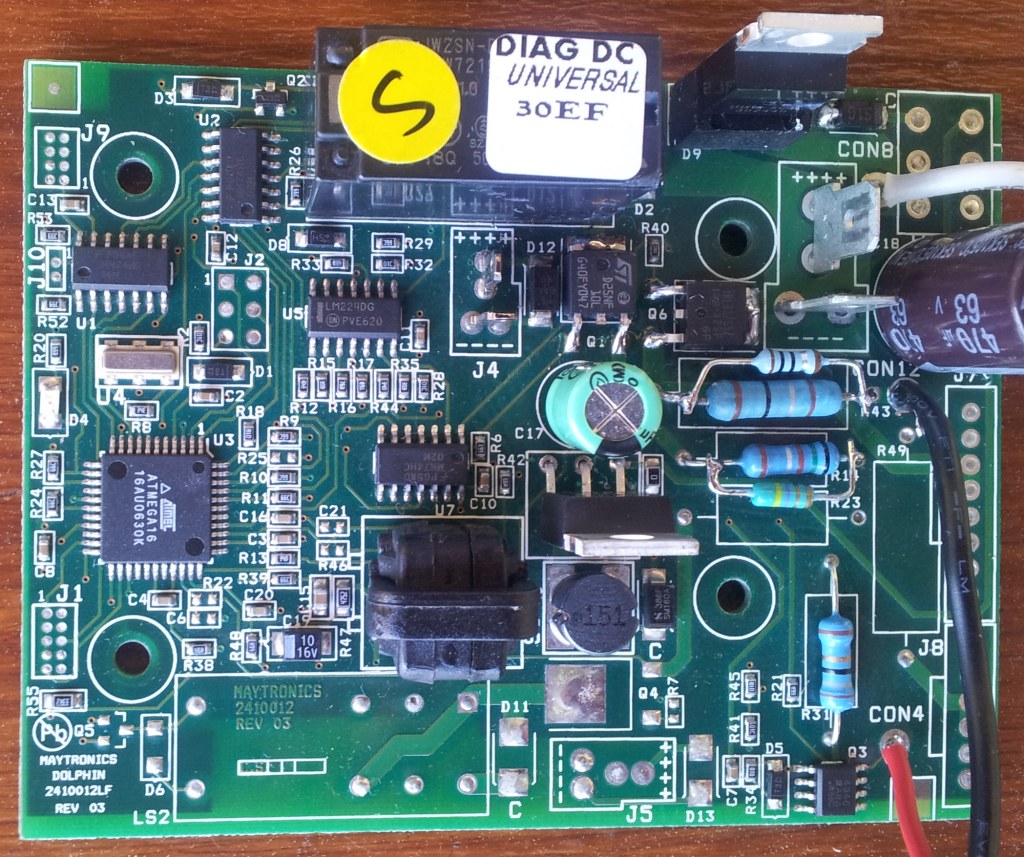
Pour en revenir au Dolphin, j'ai inspecté visuellement la carte du bloc moteur, aucune trace de défaillance (je suppose que c'est la double diode qui à du lâcher à nouveau), je regarderais avec un pote électronicien au boulot, mais ça commence à me fatiguer
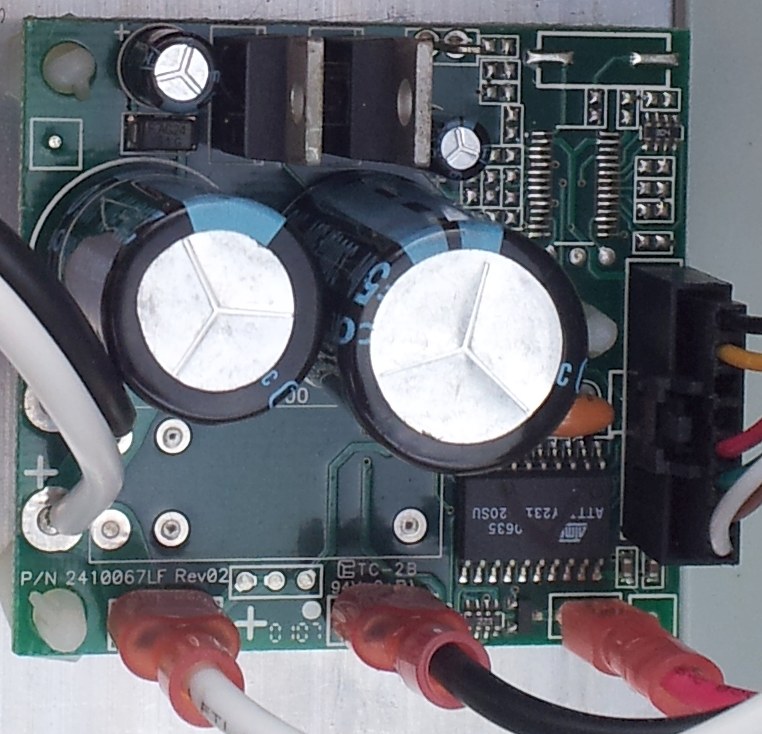
J'ai aussi ouvert le bloc alimentation, tout semble nickel.
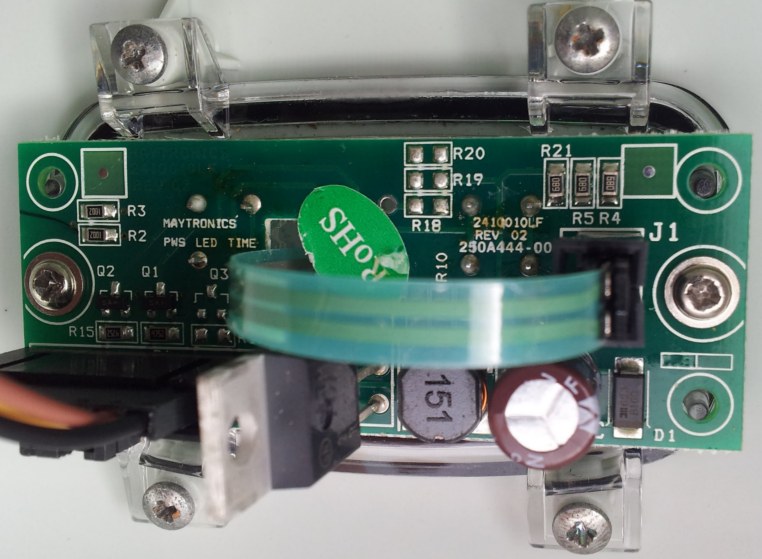
Pour info les photos des deux cartes du bloc alimentation 24V :
La carte d'alimentation :
La carte affichage/commande :
Oui, il a un micro contrôleur dans le bloc alimentation et dans le robot, les deux semblent 'discuter' par I²C (ils sont reliés un fil masse, un fil alimentation, un fil bus de communication). En cas d'autotest NOK ou de défaillance, la carte du robot envoie sans doute un code au bloc d'alimentation, ce qui provoque l'affichage clignotant des leds, puis la coupure de l'alimentation (je ne suis pas allé plus loin dans les investigations, pas le temps)
Je n'ai pas retrouvé de post (peut être mal cherché), si tu te souviens du pseudo, j'essayerais bien de le contacter.
Le problème, c'est que sur table, j'avais bien le cycle de démarrage (avant, arrière, et après quelques galops arrêt).
Je vais refaire un test sur table, mais sans doute pas avant 15 jours . . .
jmi13380 a écrit:Chapeau bas pour ta piscine (BEAU TRAVAIL)
Je n'ai fait que dessiner le plan de ce que je voulais, le bassin a été réalisé par un pisciniste, par contre je me suis occupé de tout ce qu'il y a autour (terrasse, muret, douche). J'ai aussi rajouté ultérieurement une PAC (on avait prévu le bybass dès la conception).
Pour en revenir au Dolphin, j'ai inspecté visuellement la carte du bloc moteur, aucune trace de défaillance (je suppose que c'est la double diode qui à du lâcher à nouveau), je regarderais avec un pote électronicien au boulot, mais ça commence à me fatiguer
J'ai aussi ouvert le bloc alimentation, tout semble nickel.
Pour info les photos des deux cartes du bloc alimentation 24V :
La carte d'alimentation :
La carte affichage/commande :
riri7707 a écrit:En dehors de l'eau,
il doit normalement faire son cycle de démarrage:
avant/arrière/moteur turbine puis arrêt du robot 'mise en sécurité' par détection anormale de courant de charge ( normal, la résistance dans un milieu liquide et en dehors n'est pas la même).
C'est le système que Maytronics utilisent et je pense même maintenant pour leurs robots. Et dès qu'il y a une anomalie de consommation sur un des moteurs, ben l'Atmega16 ne reçoit plus le bon signal et hop, mise en sécurité.
Oui, il a un micro contrôleur dans le bloc alimentation et dans le robot, les deux semblent 'discuter' par I²C (ils sont reliés un fil masse, un fil alimentation, un fil bus de communication). En cas d'autotest NOK ou de défaillance, la carte du robot envoie sans doute un code au bloc d'alimentation, ce qui provoque l'affichage clignotant des leds, puis la coupure de l'alimentation (je ne suis pas allé plus loin dans les investigations, pas le temps)
riri7707 a écrit:Il me semble même qu'un forumeur ait fait une bidouille pour tromper l'ATMEGA et ainsi pouvoir toujours utiliser son robot, malgré l'annomalie de consommation. Sympa s'il passe par là pour nous en dire un peu plus
Je n'ai pas retrouvé de post (peut être mal cherché), si tu te souviens du pseudo, j'essayerais bien de le contacter.
riri7707 a écrit:Donc avant de remonter et refermer le bloc moteur, tu peux déjà faire plein de manips sur une table. Tant que tu n'as pas ce cycle de démarrage, ben c'est peine perdue de tout refermer et de le remettre à l'eau.
Le problème, c'est que sur table, j'avais bien le cycle de démarrage (avant, arrière, et après quelques galops arrêt).
Je vais refaire un test sur table, mais sans doute pas avant 15 jours . . .
Modifié en dernier par laroche le Jeu 02 Mai 2019 à 18:42, modifié 1 fois.